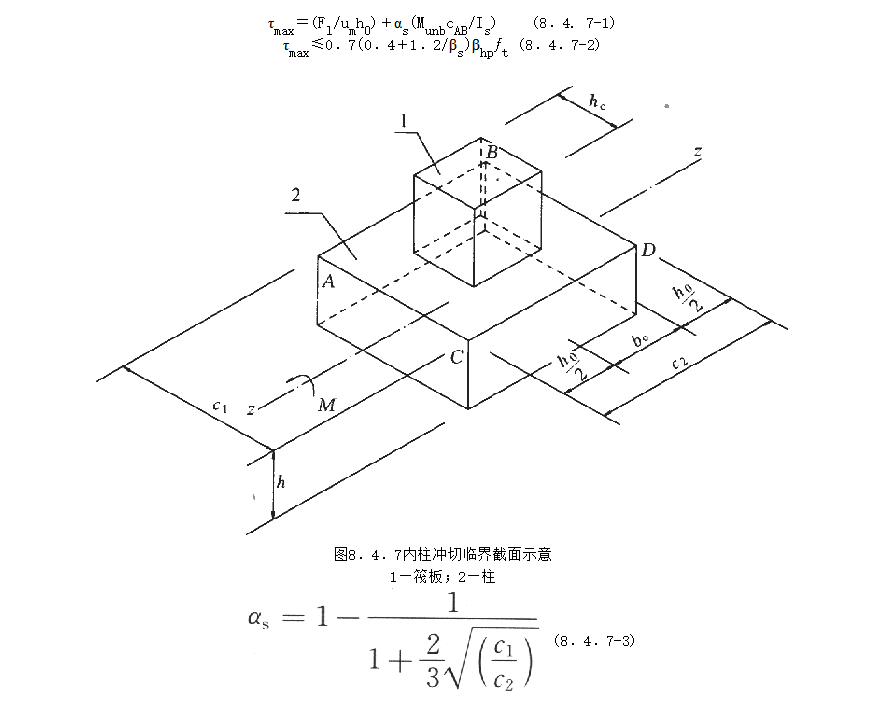
Fl——相应于作用的基本组合时的冲切力(kN),对内柱取轴力设计值减去筏板冲切破坏锥体内的基底净反力设计值;对边柱和角柱,取轴力设计值减去筏板冲切临界截面范围内的基底净反力设计值;
um——距柱边缘不小于h0/2处冲切临界截面的最小周长(m),按本规范附录P计算;
h0——筏板的有效高度(m);
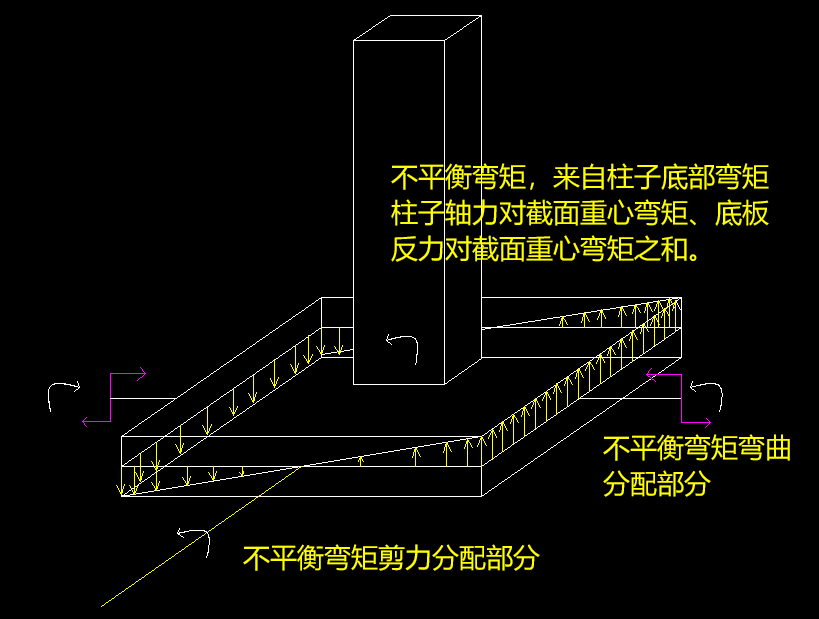
Munb——作用在冲切临界截面重心上的不平衡弯矩设计值(kN·m);
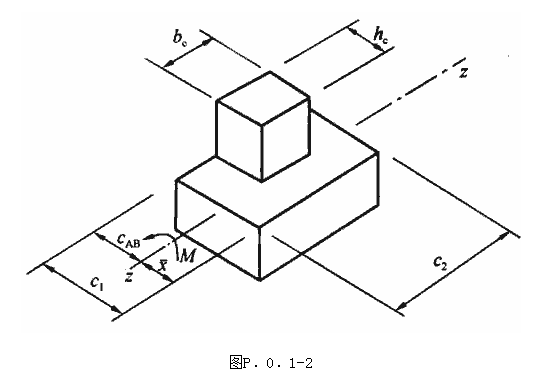
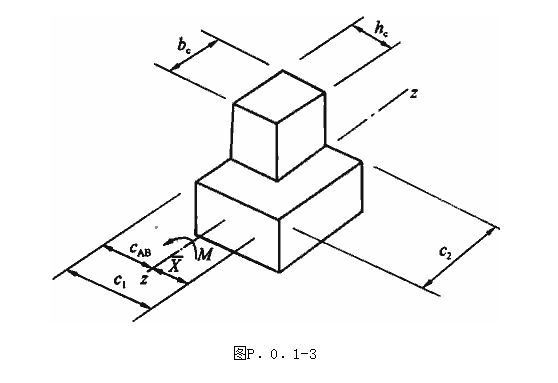
cAB——沿弯矩作用方向,冲切临界截面重心至冲切临界截面最大剪应力点的距离(m),按附录P计算;
Is——冲切临界截面对其重心的极惯性矩(m4),按本规范附录P计算;
βs——柱截面长边与短边的比值,当βs<2时,βs取2,当βs>4时,βs取4
βhp——受冲切承载力截面高度影响系数,当h≤800mm时,取βhp=1.0;当h≥2000mm时,取βhp =0.9,其间按线性内插法取值;
ƒt——混凝土轴心抗拉强度设计值(kPa);
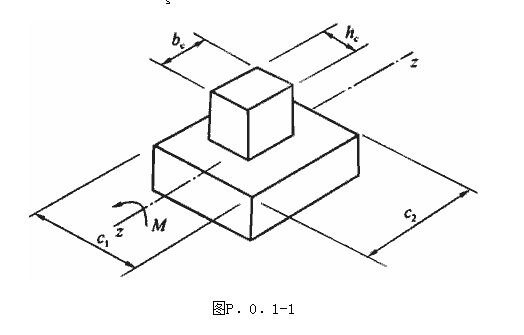
c1——与弯矩作用方向一致的冲切临界截面的边长(m),按本规范附录P计算;
c2——垂直于c1的冲切临界截面的边长(m),按本规范附录P计算;
αs——不平衡弯矩通过冲切临界截面上的偏心剪力来传递的分配系数。
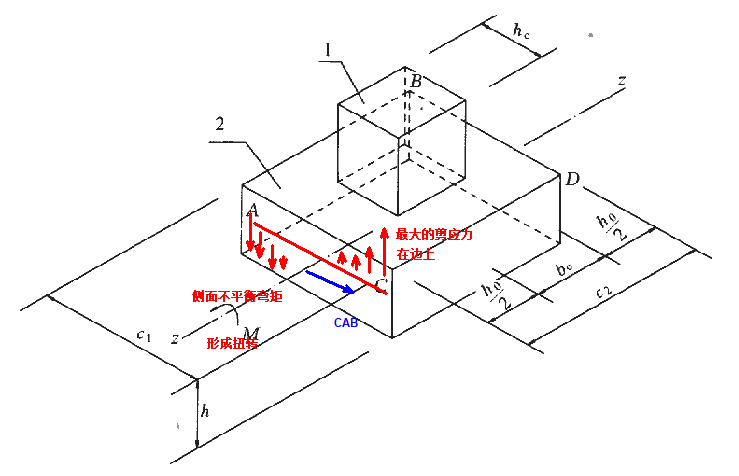
首先找到破坏临界截面,柱子边各h0/2范围,求最大的剪应力,最大剪应力由2部分组成,分别是柱子传递下来的冲切力和平板受弯产生的不平衡弯矩对破坏临界截面的产生的扭矩,由扭矩在截面最外侧产生的扭转最大剪应力。








请登录之后再进行评论